Target Recognition Autonomous Control Engine (TRACE)
Project Overview
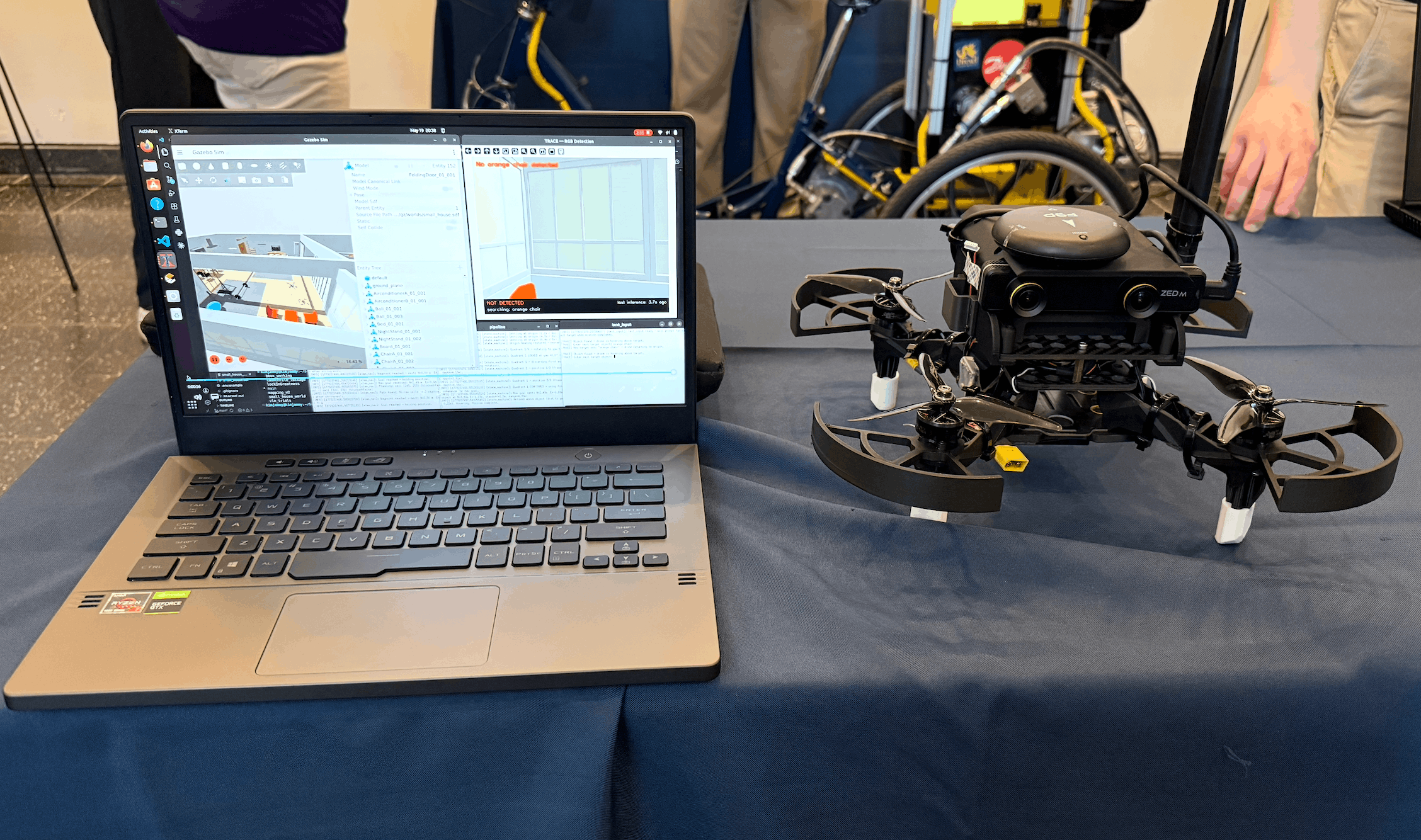
One Liner: TRACE is an open-source autonomy framework that integrates vision-language models with path planning, SLAM, and collision avoidance to enable cost-effective, intelligent aerial drones capable of autonomous area search and target recognition in real-world SAR missions.
Search and rescue (SAR) operations are critical emergency-response activities aimed at locating and assisting individuals in hazardous and time-sensitive environments. Delays in these missions can significantly reduce survival rates and increase risk to both victims and responders. In recent years, unmanned aerial vehicles have become widely used to improve search efficiency and situational awareness, significantly reducing search times. However, most existing drone systems still rely heavily on skilled human operators for decision-making. Despite advances in autonomous navigation and sensing, limited research has focused on integrating vision-language models (VLMs) with real-time drone control. Additionally, commercial SAR drones often involve high acquisition and maintenance costs, limiting accessibility and scalability of autonomous aerial technology. The objective of TRACE is to advance autonomous search and rescue operations by developing a free and open-source autonomy framework for aerial drones capable of operating in difficult terrain. TRACE demonstrates the feasibility of using VLMs to enable autonomous area search and target recognition. By integrating visual reasoning and contextual understanding with established autonomy techniques such as path planning, simultaneous localization and mapping, and collision avoidance, TRACE bridges a meaningful gap in current approaches. The system employs a perception-action pipeline in which real-time sensor data is processed by a VLM to generate high-level navigation commands, which are then translated into executable flight controls. Development is conducted using industry-standard open-source platforms, including the Gazebo simulator and the Robot Operating System (ROS). TRACE provides a scalable and cost-effective framework for deploying intelligent autonomous drones in real-world rescue scenarios.
Video available at this link.
Screenshots
2 image(s)