Semi-Autonomous Loitering UAS
Project Overview
One Liner: An autonomous, modular, and scalable UAS platform built for the future
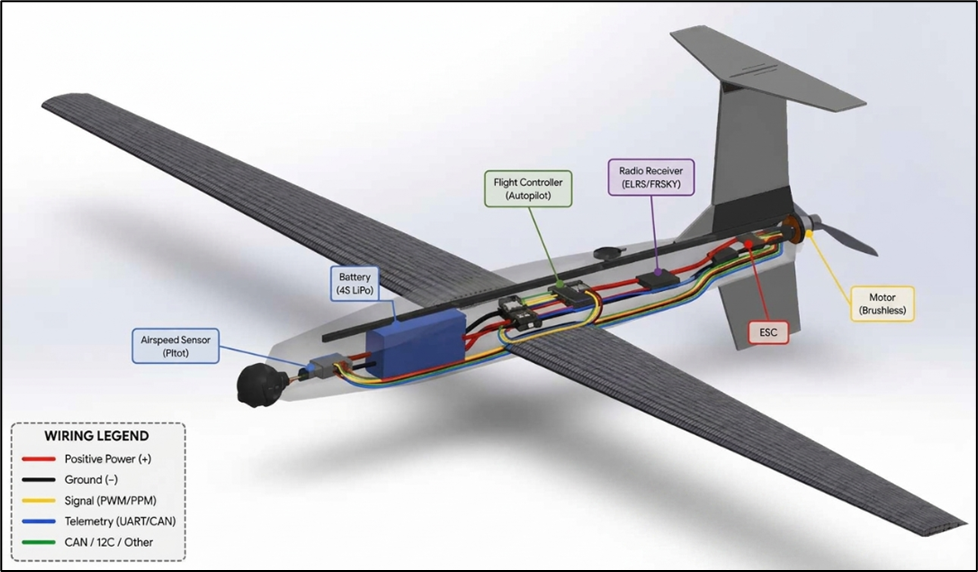
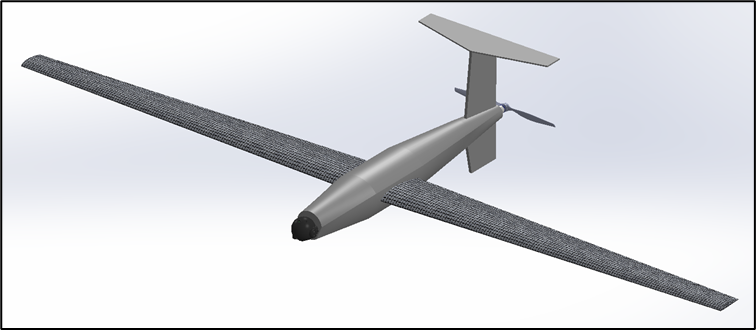
Industries such as emergency response, infrastructure management, and defense increasingly rely on persistent, real-time aerial surveillance to maintain situational awareness and support rapid decision-making. While military-grade platforms demonstrate the value of long-endurance surveillance, significant barriers prevent broader accessibility. However, current solutions force a compromise between expensive, resource-intensive manned aircraft and small multirotor drones that suffer from high operator workload and limited battery life. Even existing portable fixed-wing systems often require complex, specialized launch infrastructure or incur prohibitive costs, leaving a critical gap for an affordable, logistically simple solution. To address this gap, this project proposes the design of a modular, fixed-wing Group 1 Unmanned Aerial System (UAS) optimized for cost-effective, semi-autonomous loitering. The selected architecture features a high-wing, puller-propeller configuration to maximize stability and utilize a hand-launch and belly-landing recovery system to reduce mechanical complexity. This configuration enhances thrust efficiency and simplifies payload mounting for clear 360° visibility. Approximated aircraft performance calculations estimate a flight endurance of 2.5 hours, significantly exceeding the capabilities of standard multirotors while maintaining a projected prototype cost under $900. Future work will focus on the structural analysis of the wing and flight testing to validate the autonomous loitering algorithms, aiming to provide an accessible, high-endurance platform for long-range inspection missions.
Video available at this link.
Screenshots
1 image(s)