L.A.R.R.Y.
Project Overview
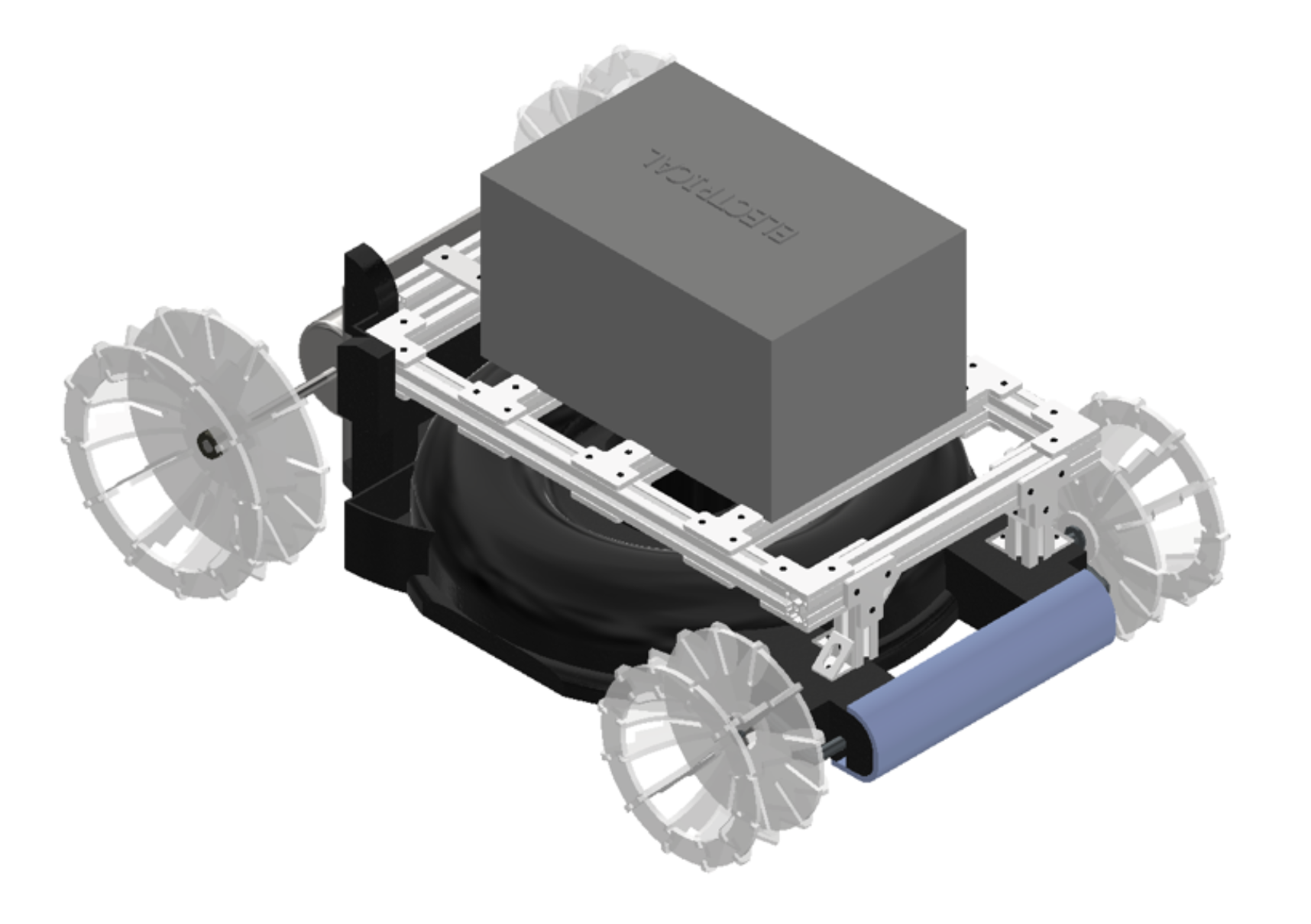
One Liner: Lawncare Autonomous Robotic Rover for Yards
Current consumer robotic lawn mowers have features that include GPS like boundary guidance which allow for full autonomy while others are remote-controlled. These mowers provide a solution for remotely cutting grass to improve grass upkeep for residential and commercial uses. However, all current market solutions are incapable of performing lawn care in a saturated environment. Their performance could be improved if there was proper traction for traversing on sloped wet terrain, and a more efficient design for cutting even grass and mitigating wet grass clumping. The LARRY Project’s objective is to develop a stop gap remote-controlled lawn care robot optimized to cut grass in wet conditions. This project looks to improve the ability of remote-controlled and robotic lawn mowers to handle the numerous challenges of properly mowing a wet lawn through implementing mechanical improvements across multiple areas of the design. The wheels are designed specifically for have more traction on wet terrain using cut polycarbonate sheets. A rubber front attachment to the housing along with a dual blade design incorporating both high-lift and mulching blades will serve to remove excess water before cutting and providing an even cut while finely cutting the grass to prevent clumping. A post cutting actuator would help further disperse the clumps of wet grass generated from cutting. The mechanical and electrical design of the LARRY project will serve as the steppingstone for the development of a low-cost autonomous solution to fill in the gaps of the robotic lawn care market.
No video available.
Screenshots
0 image(s)No screenshots uploaded yet.